Multimodal Trajectory Prediction: A Survey
Abstract
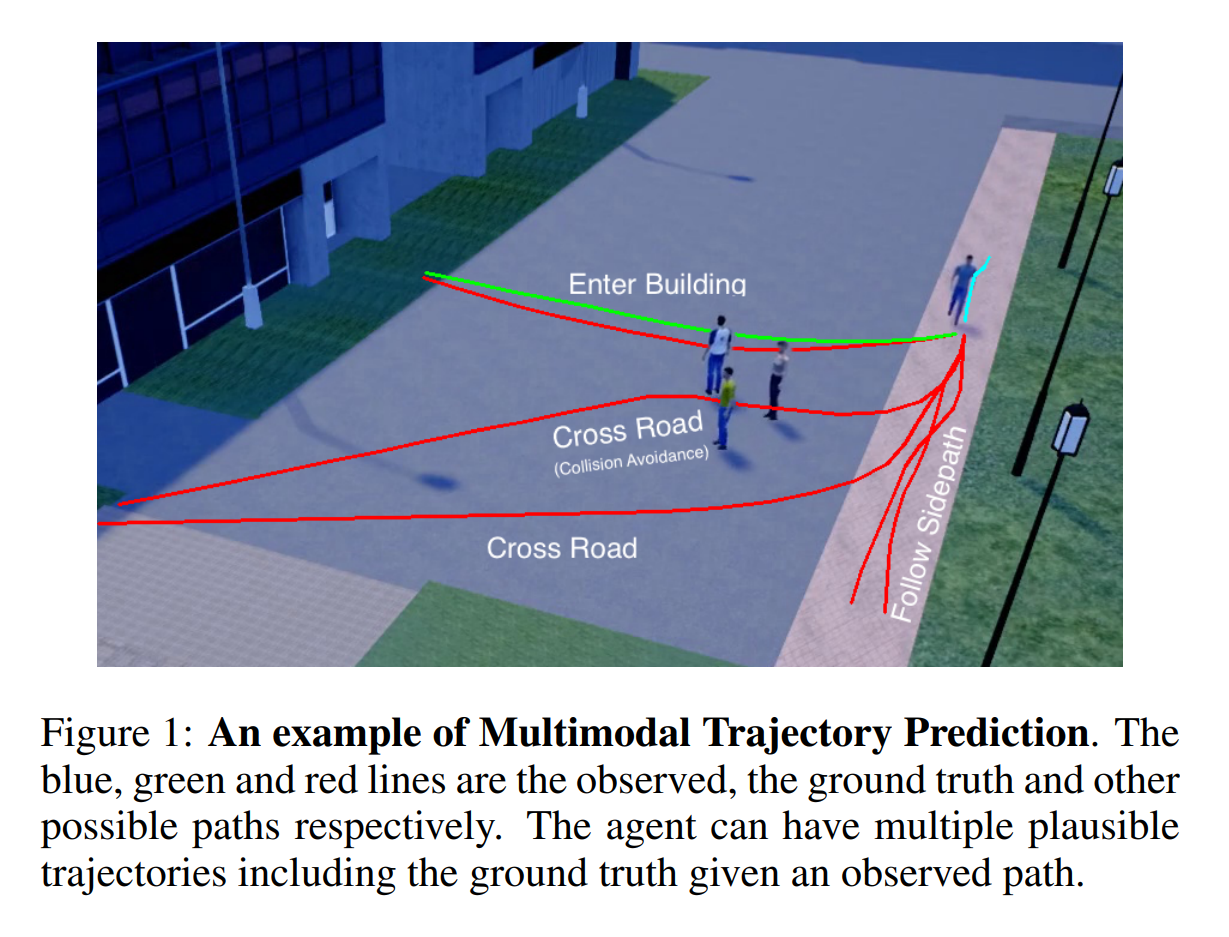
- 人类行为自然地具有多模态和不确定性的特性,通过给定过去的轨迹和环境信息,可以预测出看似合理的未来轨迹,这个任务称为MTP任务(multimodal trajectory prediction)。本文针对这一方向进行了调研,对研究、框架、数据集、指标进行了分类。
Introduction
- DTP(deterministic trajectory prediction)意味着只给定一条确定性的未来轨迹,这是不现实的;
- MTP(multimodal trajectory prediction)给出多条可能得不同模态的行为轨迹,这是更加现实的方案
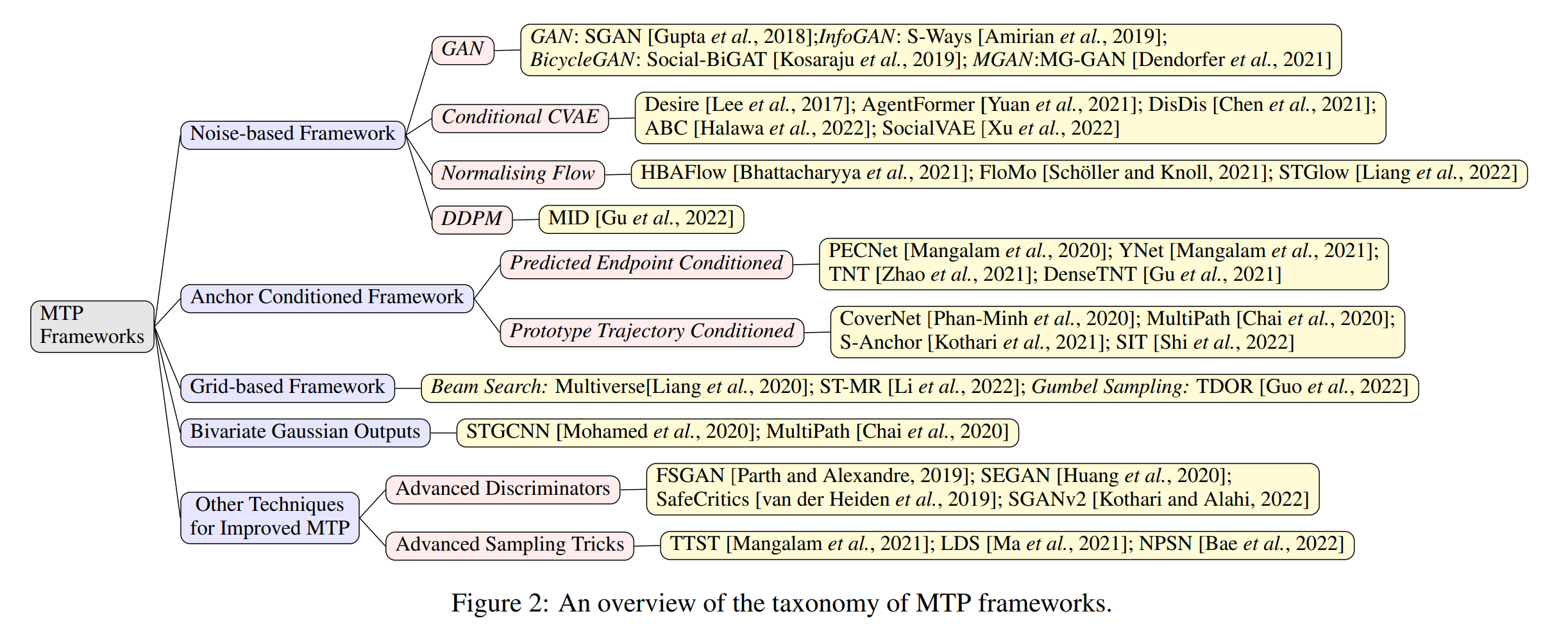
Frameworks for MTP
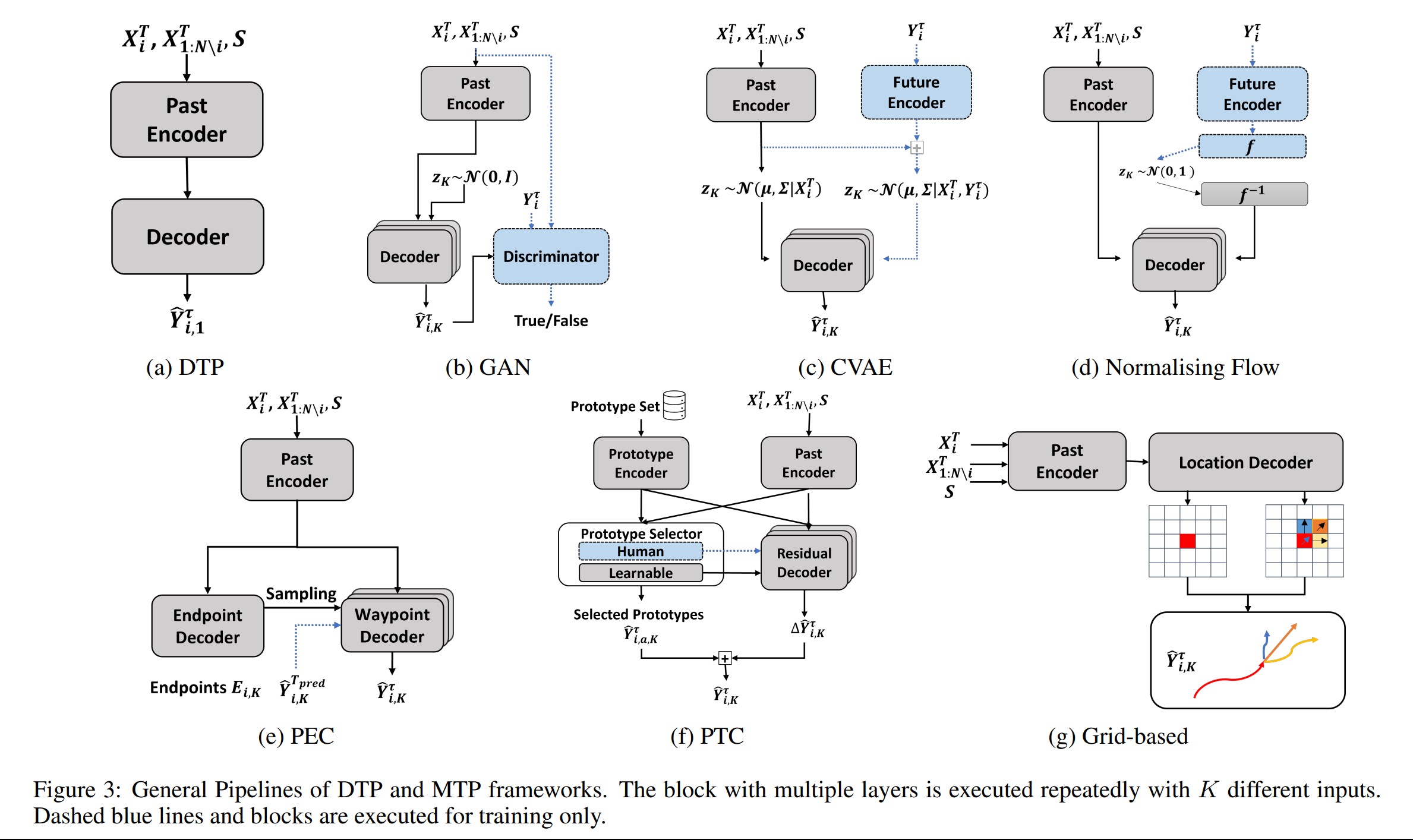
1. Noise-based MTP Framework
- 利用随机噪声将DTP模型变为MTP模型,最直接的方式是在输入中加入高斯噪声以生成多样的预测。对预测使用 variety loss 最小化重建损失:
Thiede and Brahma [2019] explain that a learner trained with variety loss can converge to the square root of the ground truth probability density function, which further illustrates the success of this loss function.
这个框架容易被整合进任何DTP方法中。但它可能生成不现实的预测轨迹,并且难以控制,在它的基础上又诞生了很多先进的 generative 框架。